×
Breadth First Search (BFS)
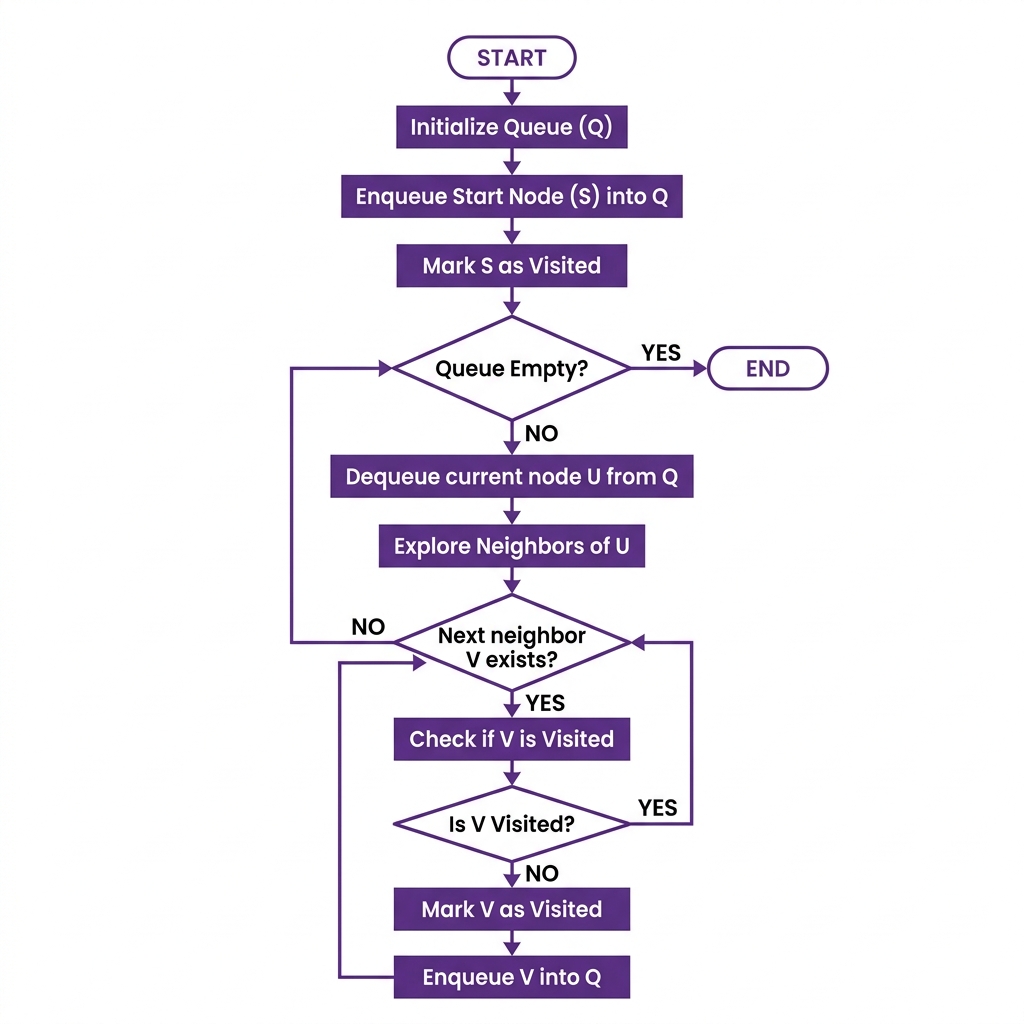
Theory: BFS is a fundamental graph traversal algorithm that explores all nodes at the current depth before moving to the next level. It uses a **First-In-First-Out (FIFO) Queue**.
Complexity: O(V + E) time, O(V) space.
Key Traits:
- Guarantees the **shortest path** in unweighted graphs.
- Optimal for finding coordinates closest to source.
- High memory usage for large graphs.